|
В уравнениях движения кривошипно-шатунного механизма вместо обозначения радиуса кривошипа "r" ошибочно записан символ "?" (гамма). P.S. Может быть это слишком очевидно, но не упомянуто, что угол поворота кривошипа ? считается малым. |
Донецкий национальный технический университет
Опубликован: 15.03.2007 | Доступ: свободный | Студентов: 6356 / 2362 | Оценка: 4.11 / 3.78 | Длительность: 12:32:00
Специальности: Математик
Лекция 11:
Компьютерное моделирование при обработке опытных данных
Необходимым условием существования минимума функции S является равенство нулю ее частных производных по каждой aj.
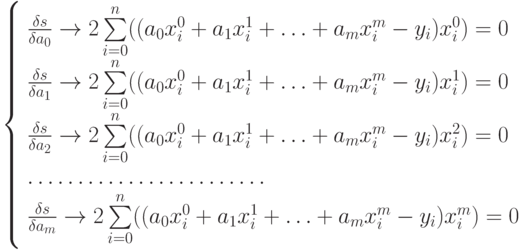
В результате получили систему линейных уравнений. Раскрывая скобки и перенося свободные члены в правой части уравнений, получим в нормальной форме систему линейных уравнений:
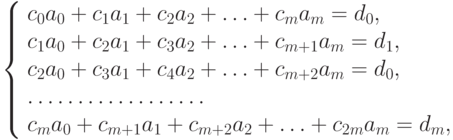 |
( 11.12) |
где
aj - неизвестные системы линейных уравнений (11.12),
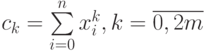 - коэффициенты системы линейных уравнений (11.12),
- коэффициенты системы линейных уравнений (11.12),
 - свободные члены системы линейных уравнений (11.12),
- свободные члены системы линейных уравнений (11.12),
Порядок системы равен m+1.
При ручном счете коэффициенты ck и свободные члены dj удобно определять, пользуясь таблицей 11.2:
| i | xi0 | xi1 | xi2 | ... | xi2m | xi0 yi | xi1 yi | ... | xim |
|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 | ||||||||
| 1 | 1 | ||||||||
| 2 | 1 | ||||||||
| ... | ... | ||||||||
| N | 1 | ||||||||
 |
c0 | c1 | c2 | ... | c2m | d0 | d1 | ... | dm |
Программирование метода наименьших квадратов (МНК)
Изменим индексацию в системе (11.12). В результате получим:
 |
( 11.13) |
где
 - неизвестные системы линейных уравнений (11.13),
- неизвестные системы линейных уравнений (11.13),
 - коэффициенты системы линейных уравнений (11.13),
- коэффициенты системы линейных уравнений (11.13),
 - свободные члены системы линейных уравнений (11.13),
- свободные члены системы линейных уравнений (11.13),
(xi, yi) - координаты узловых точек табличной функции,  ,
,
m - степень аппроксимирующего многочлена вида:
 |
( 11.14) |
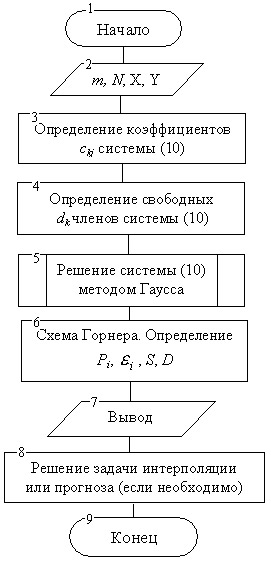
Алгоритм задачи:
- Строим систему линейных уравнений (11.13). Определяем коэффициенты ck,j и свободные члены dk. Т.к. система (11.13) симметрична относительно главной диагонали, то достаточно определить только наддиагональные элементы системы.
- Решаем систему (11.13) методом Гаусса. Находим коэффициенты aj многочлена (11.14).
- Строим аппроксимирующий многочлен (11.14) и определяем его значение в каждой узловой точке Pi = Pm(xi).
- Находим уклонение каждой узловой точки
 .
. - Находим сумму квадратов уклонений по всем узловым точкам
 .
. - Находим остаточную дисперсию
 .
.
Для построения аппроксимирующего многочлена (11.11) и вычисления его значения в каждой узловой точке используем рациональную форму многочлена:
 |
( 11.15) |
Тогда для вычисления значения многочлена (11.15) удобно пользоваться схемой Горнера. Рекуррентная формула по схеме Горнера имеет вид:

Укрупненная схема алгоритма МНК представлена на рис.11.7. Схемы алгоритмов основных блоков представлены на рисунках 11.8-11.10.
Равиль Султанов