Эволюционное программирование
10.4. Применение эволюционного программирования в задачах управления
Кроме задач прогнозирования ЭВ используется при решении задач управления [4]. В этом случае целью является построение в процессе эволюции автомата, который выдает на выход некоторое управляющее воздействие.
В дальнейших экспериментах, для определенности, автомат должен выдать выходной сигнал, равный 5. Здесь особи популяции представляют модели целевого устройства управления, которые видоизменяются для того, чтобы получить необходимое выходное управляющее воздействие. Пусть для простоты алфавит автоматов состоит из целых чисел {0,1,2,…,9}. В первой серии экспериментов [4] в качестве целевого устройства использовался циклический автомат с тремя состояниями, представленный на рис.10.5. Во второй серии экспериментов применялись случайные автоматы с  состояниями.
состояниями.
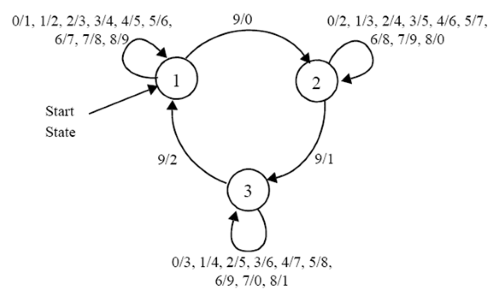
Как видно из рис.10.5, в качестве начального используется первое состояние автомата. Данный автомат, находясь в состоянии 1 при подаче входного сигнала  на выходе генерирует значение
на выходе генерирует значение  (по модулю 10). При подаче на вход 9 автомат выдает на выход 0 и переходит в следующее состояние
(по модулю 10). При подаче на вход 9 автомат выдает на выход 0 и переходит в следующее состояние  . Аналогично в состоянии 2 входные символы 0,1,2,…,8 генерируют выходы 2,3,…,9,0 соответственно. И наконец, в последнем состоянии 3 входы 0,1,2,…,8 производят выходы 3,4,….0,1. Аналогично может быть построен подобный циклический автомат для произвольного числа состояний. Отметим, что этот автомат полностью контролируем – то есть для каждого состояния существует входной сигнал, который выдает необходимое управляющее воздействие 5. С другой стороны, случайный автомат с состояниями может быть либо частично контролируемым (для некоторых состояний существует входной сигнал, выдающий управляющее воздействие), либо неконтролируемым (ни для одного состояния не существует входного сигнала, которые генерирует управляющее воздействие).
. Аналогично в состоянии 2 входные символы 0,1,2,…,8 генерируют выходы 2,3,…,9,0 соответственно. И наконец, в последнем состоянии 3 входы 0,1,2,…,8 производят выходы 3,4,….0,1. Аналогично может быть построен подобный циклический автомат для произвольного числа состояний. Отметим, что этот автомат полностью контролируем – то есть для каждого состояния существует входной сигнал, который выдает необходимое управляющее воздействие 5. С другой стороны, случайный автомат с состояниями может быть либо частично контролируемым (для некоторых состояний существует входной сигнал, выдающий управляющее воздействие), либо неконтролируемым (ни для одного состояния не существует входного сигнала, которые генерирует управляющее воздействие).
Следует отметить, что адаптивные автоматные модели достаточно широко используются в работах по мультиагентным системам ("рой пчел", "колония муравьев" и т.п.), которые тесно примыкают к эволюционным вычислениям [5]).