|
В уравнениях движения кривошипно-шатунного механизма вместо обозначения радиуса кривошипа "r" ошибочно записан символ "?" (гамма). P.S. Может быть это слишком очевидно, но не упомянуто, что угол поворота кривошипа ? считается малым. |
Инспектор
Вы можете этот курс.
Опубликован: 15.03.2007 | Уровень: специалист | Доступ: платный | ВУЗ: Донецкий национальный технический университет
Лекция 12:
Компьютерное моделирование и решение нелинейных уравнений
Метод Рунге - Кутта 2-го порядка (модифицированный метод Эйлера)
Отбросим в (12.4) члены ряда, содержащие h3, h4, h5:.
Тогда
 |
( 12.6) |
Чтобы сохранить член ряда, содержащий h2, надо определить вторую производную y"(xi).Ее можно аппроксимировать разделенной разностью 2-го порядка

Подставляя это выражение в (12.6), получим

Окончательно, модифицированная или уточненная формула Эйлера имеет вид:
 |
( 12.7) |
Как видно, для определения функции y(x) в точке i+1 необходимо знать значение правой части дифференциального уравнения f(xi+1, yi+1) в этой точке, для определения которой необходимо знать предварительное значение yi+1.
Для определения предварительного значения yi+1 воспользуемся формулой Эйлера. Тогда все вычисления на каждом шаге по модифицированной или уточненной формуле Эйлера будем выполнять в два этапа:
На первом этапе вычисляем предварительное значение  по формуле Эйлера
по формуле Эйлера

На втором этапе уточняем значение y=i+1 по модифицированной или уточненной формуле Эйлера

Точность метода определяется отброшенными членами ряда Тейлора (12.4), т.е. точность уточненного или модифицированного метода Эйлера на каждом шаге  .
.
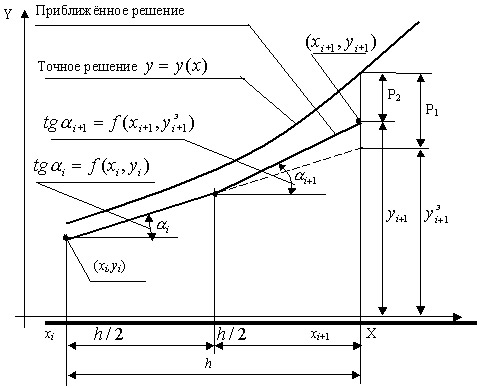
Рассмотрим геометрический смысл модифицированного метода Эйлера.
Так как


где
 - тангенс угла наклона касательной к искомой функции у(х) в начальной точке каждого шага,
- тангенс угла наклона касательной к искомой функции у(х) в начальной точке каждого шага,
 - тангенс угла наклона касательной к искомой функции у(х) в конечной точке каждого шага.
- тангенс угла наклона касательной к искомой функции у(х) в конечной точке каждого шага.
Здесь
P1 - накопленная ошибка в (i+1)й точке по методу Эйлера,
P2 - накопленная ошибка в (i+1)й точке по модифицированному методу Эйлера.
Как видно из рис.12.11, в первой половине каждого шага, то есть на участке [xi, xi+h/2], искомая функция y(x) аппроксимируется прямой, которая выходит из точки (xi, yi) под углом, тангенс которого  .
.
Во второй половине этого же шага, т.е. на участке [xi + h/2,xi + h], искомая функция y(x) аппроксимируется прямой, которая выходит из точки с координатами
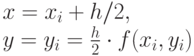
под углом, тангенс которого

В результате в модифицированном методе Эйлера функция у(х) на каждом шаге аппроксимируется не одной прямой, а двумя.
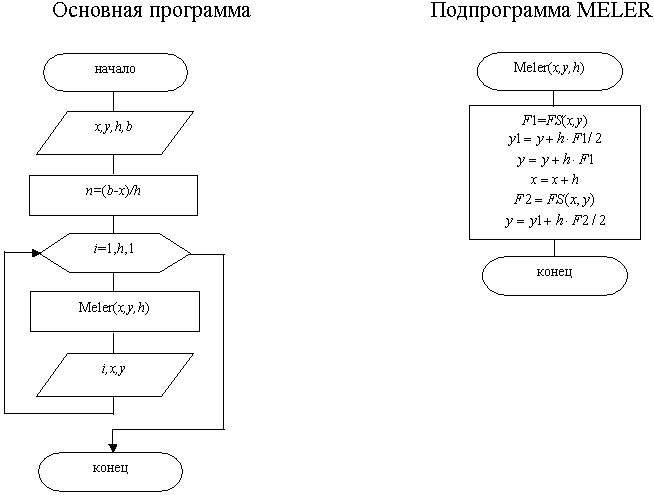
Алгоритм модифицированного метода Эйлера можно построить в виде двух программных модулей: основной программы и подпрограммы МELER, реализующей метод (рис. 12.13).
Здесь
(x,y) -при вводе начальная точка, далее текущие значения табличной функции,
h -шаг интегрирования дифференциального уравнения,
b -конец интервала интегрирования.
Равиль Султанов