|
В уравнениях движения кривошипно-шатунного механизма вместо обозначения радиуса кривошипа "r" ошибочно записан символ "?" (гамма). P.S. Может быть это слишком очевидно, но не упомянуто, что угол поворота кривошипа ? считается малым. |
Инспектор
Вы можете этот курс.
Опубликован: 15.03.2007 | Уровень: специалист | Доступ: платный | ВУЗ: Донецкий национальный технический университет
Лекция 12:
Компьютерное моделирование и решение нелинейных уравнений
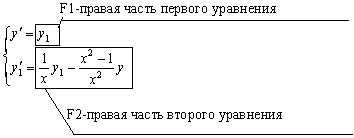
Для вычисления правых частей уравнений системы (12.14) необходимо сформировать подпрограмму PRAV.
Вернемся к примеру (12.13). Здесь на каждом шаге в подпрограмме PRAV будем вычислять правые части каждого уравнения системы:
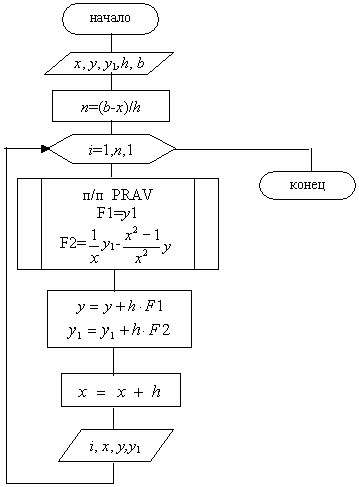
Схема алгоритма решения системы (12.13) представлена на рис 12.16.
Здесь
h - шаг интегрирования дифференциального уравнения,
b - конец участка,
n - число шагов интегрирования уравнения,
x, y, y1 - при вводе начальные значения, далее - текущие значения табличной функции.
Равиль Султанов