Опубликован: 17.06.2013 | Доступ: свободный | Студентов: 6357 / 3682 | Длительность: 17:10:00
Темы: САПР, Аппаратное обеспечение
Специальности: Архитектор программного обеспечения, Разработчик аппаратуры
Лекция 3:
Внешние запоминающие устройства
Линейный привод
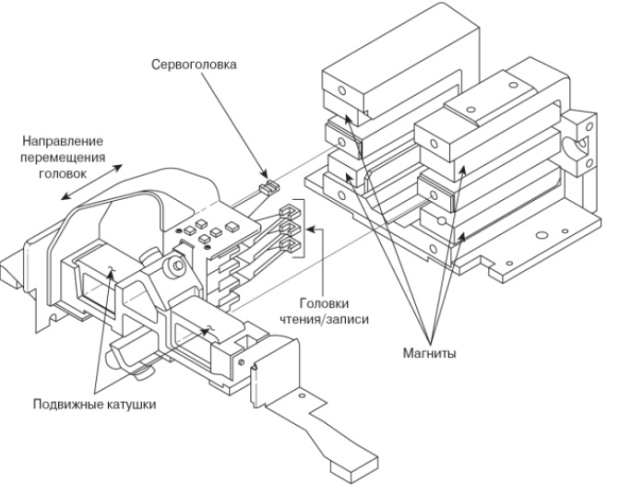
Линейный привод перемещает головки по прямой, строго вдоль линии радиуса диска. Катушки располагаются в зазорах постоянных магнитов. Главное достоинство линейного привода состоит в том, что при его использовании не возникают азимутальные погрешности, характерные для поворотного привода. (Под азимутом понимается угол между плоскостью рабочего зазора головки и направлением дорожки записи.) При перемещении с одного цилиндра на другой головки не поворачиваются и их азимут не изменяется.
Линейный привод имеет существенный недостаток: его конструкция слишком массивна. Чтобы повысить производительность накопителя, нужно снизить массу привода и самих головок. Чем легче механизм, тем с большими ускорениями он может перемещаться с одного цилиндра на другой. Линейные приводы намного тяжелее поворотных, поэтому в современных накопителях они не используются.
Поворотный привод работает по тому же принципу, что и линейный, но в нем к подвижной катушке крепятся концы рычагов головок. При движении катушки относительно постоянного магнита рычаги перемещения головок поворачиваются, передвигая головки к оси или к краям дисков. Благодаря небольшой массе такая конструкция может двигаться с большими ускорениями, что позволяет существенно сократить время доступа к данным. Быстрому перемещению головок способствует и тот факт, что плечи рычагов делаются разными: то, на котором смонтированы головки, имеет большую длину.
К недостаткам этого привода следует отнести то, что головки при перемещении от внешних цилиндров к внутренним поворачиваются и угол между плоскостью магнитного зазора головки и направлением дорожки изменяется. Именно поэтому ширина рабочей зоны диска (зоны, в которой располагаются дорожки) оказывается зачастую ограниченной (для того чтобы неизбежно возникающие азимутальные погрешности оставались в допустимых пределах). В настоящее время поворотный привод используется почти во всех накопителях с подвижной катушкой.
Сервопривод
Для управления приводами с подвижной катушкой в разное время использовались три способа построения петли обратной связи:
- со вспомогательным "клином";
- со встроенными кодами;
- со специализированным диском.
Они различаются технической реализацией, но, по сути, предназначены для достижения одной и той же цели: обеспечивать постоянную корректировку положения головок и их наведение (позиционирование) на соответствующий цилиндр. Основные различия между ними сводятся к тому, на каких участках поверхностей дисков записываются сервокоды.
При всех способах построения петли обратной связи для ее работы необходима специальная информация (сервокоды), которая записывается на диск при его изготовлении. Обычно она записывается в так называемом коде Грея. В этой системе кодирования при переходе от одного числа к следующему или предыдущему изменяется всего один двоичный разряд. Сервокоды записываются на диск при сборке накопителя и не изменяются в течение всего срока его эксплуатации.
Запись сервокодов выполняется на специальном устройстве, в котором головки последовательно перемещаются на строго определенные позиции, и в этих положениях на диски записываются упомянутые выше коды. Для точной установки головок в таких устройствах используется лазерный прицел, а расстояния определяются методом интерференции, т.е. с точностью до долей волны лазерного излучения. Поскольку перемещение головок в таком устройстве осуществляется механически (без участия собственного привода накопителя), все работы проводятся в чистом помещении либо с открытой крышкой блока HDA, либо через специальные отверстия, которые по окончании записи сервокодов заклеиваются герметизирующей лентой.
При обычных операциях считывания и записи удалить сервокоды невозможно. Этого нельзя сделать даже при форматировании низкого уровня. Во многих современных накопителях с приводом от подвижной катушки в процессе работы через определенные промежутки времени выполняется температурная калибровка. Эта процедура заключается в том, что все головки поочередно переводятся с нулевого на какой-либо другой цилиндр. При этом с помощью встроенной схемы проверяется, насколько сместилась заданная дорожка относительно своего положения в предыдущем сеансе калибровки, и вычисляются необходимые поправки, которые заносятся в оперативное запоминающее устройство в самом накопителе. Впоследствии эта информация используется при каждом перемещении головок, позволяя устанавливать их с максимальной точностью.
В большинстве накопителей температурная калибровка выполняется через каждые 5 мин в течение первого получаса после включения питания, а затем через каждые 25 мин. Некоторые пользователи полагают, что произошла ошибка при считывании данных, но на самом деле просто подошло время очередной калибровки.
Вспомогательный клин
Такая система записи сервокодов использовалась в первых накопителях с подвижной катушкой. Вся информация, необходимая для наведения (позиционирования) головок, записывалась в кодах Грея в узком секторе ("клине") каждого цилиндра непосредственно перед индексной меткой. Индексная метка обозначает начало каждой дорожки, т.е. вспомогательная информация записывается в предындексном интервале, расположенном в конце каждой дорожки. Этот участок необходим для компенсации неравномерности вращения диска и тактовой частоты записи, и контроллер диска обычно к нему не обращается.
Некоторым контроллерам необходимо сообщать о том, что к ним подключен накопитель со вспомогательным клином. В результате они корректируют (сокращают) длину секторов, чтобы поместить область вспомогательного клина.

Самый существенный недостаток подобной системы записи состоит в том, что считывание происходит только один раз при каждом обороте диска. Это означает, что во многих случаях для точного определения и коррекции положения головок диск должен совершить несколько оборотов. Недостаток этот был очевиден с самого начала, поэтому подобные системы никогда не были широко распространены, а сейчас и вовсе не используются.
Встроенные коды
Такой метод реализации обратной связи представляет собой улучшенный вариант системы со вспомогательным клином. В данном случае сервокоды записываются не только в начале каждого цилиндра, но и перед началом каждого сектора. Это означает, что сигналы обратной связи поступают на схему привода головок несколько раз в течение каждого оборота диска и головки устанавливаются в нужное положение намного быстрее. Еще одно преимущество (по сравнению с системой со специализированным диском) заключается в том, что сервокоды записываются на всех дорожках, поэтому может быть скорректировано положение каждой головки.
Описанный способ используется в большинстве современных накопителей. Как и в системах со вспомогательным клином, встроенные сервокоды защищены от стирания и любые операции записи блокируются, если головки оказываются над участками со служебной информацией. Поэтому даже при форматировании низкого уровня удалить сервокоды невозможно.
Система со встроенными сервокодами работает лучше, чем со вспомогательным клином, потому что служебная информация (сервокоды) считывается несколько раз за каждый оборот диска. Но вполне очевидно, что еще более эффективной должна быть система, при которой цепь обратной связи работает непрерывно, т.е. сервокоды считываются постоянно.
Системы со специализированным диском
При реализации данного способа сервокоды записываются вдоль всей дорожки, а не только один раз в ее начале или в начале каждого сектора. Естественно, если так поступить со всеми дорожками накопителя, то в нем не останется места для данных. Поэтому одна сторона одного из дисков выделяется исключительно для записи сервокодов.
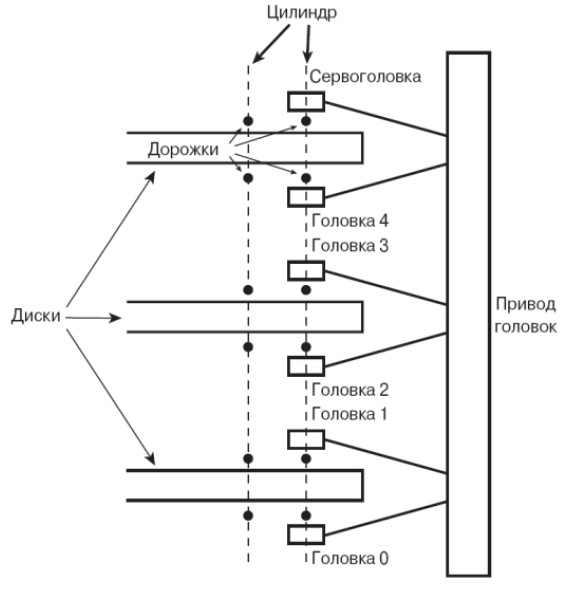
При сборке накопителей со специализированным диском одна из сторон определенного диска изымается из нормального использования для операций чтения/записи; вместо этого на ней записывается последовательность сервокодов, которые в дальнейшем используются для точного позиционирования головок. Причем обслуживающая эту сторону диска сервоголовка не может быть переведена в режим записи, т.е. сервокоды, как и во всех рассмотренных выше системах, невозможно стереть ни при обычной записи данных, ни при форматировании низкого уровня.
Когда в накопитель поступает команда о переводе головок на конкретный цилиндр, внуреннее электронное устройство использует полученные сервоголовкой сигналы для точного определения положения всех остальных головок. В процессе движения головок номера дорожек непрерывно считываются с поверхности специализированного диска. Когда под сервоголовкой оказывается искомая дорожка, привод останавливается. После этого выполняется точная настройка положения головок и лишь затем выдается сигнал разрешения записи. И хотя только одна головка (сервоголовка) используется для считывания сервокодов, все остальные смонтированы на общем жестком каркасе, поэтому если одна головка будет находиться над нужным цилиндром, то и все остальные тоже.
Автоматическая парковка головок
При выключении питания с помощью контактной парковочной системы ( Contact Start Stop - CSS ) рычаги с головками опускаются на поверхности дисков. Накопители способны выдержать тысячи "взлетов" и "посадок" головок, но желательно, чтобы они происходили на специально предназначенных для этого участках поверхности дисков, на которых не записываются данные.
При этих взлетах и посадках происходит износ (абразия) рабочего слоя, так как из-под головок вылетают "клубы пыли", состоящие из частиц рабочего слоя носителя; если же во время взлета или посадки произойдет сотрясение накопителя, то вероятность повреждения головок и дисков существенно возрастет. В более современных накопителях, использующих механизм загрузки/разгрузки, непосредственно над внешней поверхностью жестких дисков установлена наклонная пластина, что позволяет избежать контакта между головками и жесткими дисками даже при отключении накопителя. После прекращения подачи напряжения накопитель с механизмом загрузки/разгрузки автоматически "паркует" головки на наклонной пластине.
Воздушные фильтры
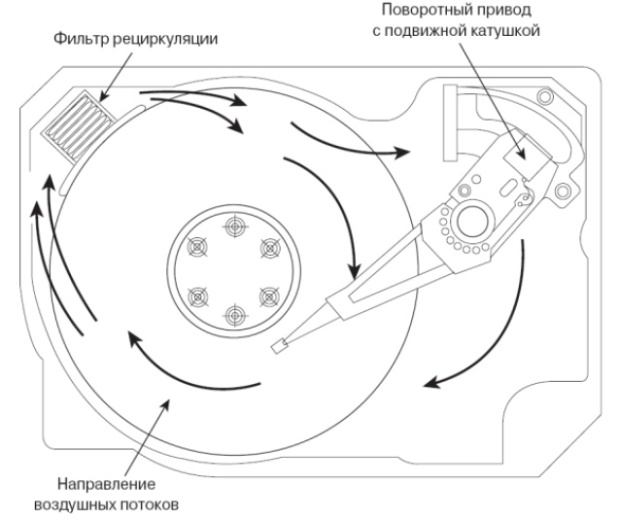
Почти во всех накопителях на жестких дисках используются два воздушных фильтра: фильтр рециркуляции и барометрический фильтр. В отличие от сменных фильтров, которые устанавливались в старых накопителях больших машин, они располагаются внутри корпуса и не подлежат замене в течение всего срока службы накопителя.
Фильтр рециркуляции в блоке HDA предназначен только для очистки внутренней "атмосферы" от небольших частиц рабочего слоя носителя (а также от любых других мелких частиц, попадающих внутрь HDA ), которые, несмотря на все предпринимаемые меры, все же осыпаются с дисков при взлетах и посадках головок.
Внешний воздух проникает внутрь HDA сквозь барометрический фильтр, так как это необходимо для выравнивания давления изнутри и снаружи блока. Именно потому, что жесткие диски не являются полностью герметичными устройствами, изготовители указывают для них диапазон высот над уровнем моря, в котором они сохраняют работоспособность (обычно от -300 до +3 000 м). По мере изменения атмосферного давления воздух выходит из накопителя или наоборот - проникает в него сквозь вентиляционное отверстие, чтобы выровнять давление снаружи и внутри устройства.
Акклиматизация жестких дисков
| Исходная температура, С | Время акклиматизации, ч |
|---|---|
| +4 | 13 |
| -1 | 15 |
| -7 | 16 |
| -12 | 17 |
| -18 | 18 |
| -23 | 20 |
| -29 | 22 |
| -34 и ниже | 27 |
Как уже отмечалось, блок HDA плотно закрыт, но не герметизирован (исключение составляют накопители, предназначенные специально для военных целей, в частности для военной авиации). Это означает, что блок HDA не является воздухонепроницаемым и внутри него содержится воздух. Для выравнивания давления в блоке предусмотрено закрытое фильтром отверстие, через которое воздух может проникать внутрь или наружу.
Барометрический фильтр не препятствует проникновению влаги внутрь блока HDA, поэтому по прошествии некоторого времени влажность воздуха внутри блока будет такой же, как и снаружи. Если влага начнет конденсироваться внутри блока HDA и в это время будет включено питание компьютера, то возникнут серьезные проблемы. В инструкциях по эксплуатации большинства жестких дисков приводятся таблицы или графики их акклиматизации при изменении условий окружающей среды (температуры и влажности).
Шпиндельный двигатель
Двигатель, приводящий во вращение диски, часто называют шпиндельным (spindle). Шпиндельный двигатель всегда связан с осью вращения дисков, никакие приводные ремни или шестерни для этого не используются. Двигатель должен быть бесшумным: любые вибрации передаются дискам и могут привести к ошибкам при считывании и записи.
Частота вращения двигателя должна быть строго определенной. Обычно она колеблется от 3 600 до 15 000 об/мин или больше, а для ее стабилизации используется схема управления двигателем с обратной связью (автоподстройкой), позволяющая добиться необходимой точности.
Информация о частоте вращения дисков просто не передается (и не должна передаваться) через интерфейс контроллера жесткого диска. В большинстве накопителей шпиндельный двигатель располагается в нижней части, под блоком HDA. Однако во многих современных устройствах он встраивается внутрь блока HDA и представляет собой центральную часть блока дисков-носителей. Такая конструкция позволяет, не изменяя размера накопителя по вертикали, увеличить количество дисков в блоке (в "стопке").
Гидродинамические подшипники
Традиционные конструкции шпиндельных электродвигателей предусматривают использование шариковых подшипников. Основным недостатком шариковых подшипников является радиальное биение, возникающее в результате поперечного смещения шариков на величину зазора и составляющее примерно 0,1 микродюйма (миллионную часть дюйма). Величина радиального биения на первый взгляд кажется весьма незначительной, но при увеличении плотности записи в современных накопителях это становится определенной проблемой. Существующее биение является причиной возникновения хаотических поперечных движений жесткого диска, которые приводят к неустойчивым колебаниям дорожек по отношению к головкам чтения/записи. Кроме того, имеющиеся зазоры и соударения металлических шариков стали причиной повышения уровня генерируемого механического шума и вибраций, которые ухудшают рабочие характеристики накопителей, имеющих высокую скорость вращения.
Решением этой проблемы стал совершенно новый тип подшипника, получившего название гидродинамического, в котором основную роль играет высокопластичная смазка, находящаяся между шпинделем и втулкой двигателя. Использование высокопластичной гидродинамической смазки позволяет уменьшить радиальное биение подшипника до 0,01 микродюйма, что приводит к заметному снижению уровня вибрации и поперечного смещения жестких дисков. Благодаря гидродинамическим подшипникам повышается ударная прочность жесткого диска, улучшается регулирование скорости и снижается уровень генерируемого шума. На сегодняшнем рынке уже появился целый ряд накопителей, использующих гидродинамические подшипники. В частности, к их числу относятся накопители, имеющие очень высокую скорость вращения, высокую плотность записи данных или повышенные требования к уровню шума.
Платы управления, кабели и разъемы накопителей
В каждом накопителе, в том числе и на жестких дисках, есть хотя бы одна плата. На ней монтируются электронные схемы для управления шпиндельным двигателем и приводом головок, а также для обмена данными с контроллером. В накопителях IDE контроллер устанавливается непосредственно в накопителе, а для накопителей SCSI необходимо использовать дополнительную плату расширения.
В большинстве накопителей на жестких дисках предусмотрено несколько интерфейсных разъемов для подключения к системе, подачи питания, а иногда и для заземления корпуса. Как правило, накопители имеют по меньшей мере три типа разъемов:
- интерфейсный разъем (или разъемы);
- разъем питания;
- разъем (или зажим) для заземления (необязательно).
Наибольшее значение имеют интерфейсные разъемы, потому что через них передаются данные и команды в накопитель и обратно. Многие стандарты интерфейсов предусматривают подключение нескольких накопителей к одному кабелю (шине). Разъемы питания накопителей на жестких дисках обычно такие же, как и у дисководов для гибких дисков. В большинстве накопителей используются два напряжения питания (5 и 12 В), но малогабаритным моделям, разработанным для портативных компьютеров, достаточно напряжения 5 В. Как правило, от источника в 12 В питается схема управления шпиндельным двигателем и привод головок, а напряжение 5 В поступает на прочие схемы. Зажим для заземления необходим для того, чтобы обеспечить надежный контакт между общим проводом накопителя и корпусом системы. В компьютерах, где накопители крепятся непосредственно к корпусу с помощью металлических винтов, специальный провод заземления не нужен. В некоторых компьютерах накопители монтируются на пластмассовых или стеклотекстолитовых направляющих, которые электр ически изолируют корпус накопителя от корпуса системы. В этом случае их обязательно нужно соединить дополнительным проводом, подключаемым к упомянутому зажиму. При плохом заземлении накопителя возникают сбои в его работе, ошибки при считывании и записи и т.п.
S.M.A.RT.
Технология самотестирования, анализа и отчетности (Self )Monitoring, Analysis and Reporting Technology - S.M.A.RT.) - это новый промышленный стандарт, описывающий методы предсказания появления ошибок жесткого диска. При активизации системы S.M.A.R.T. жесткий диск начинает отслеживать определенные параметры, чувствительные к неисправностям накопителя или указывающие на них.
На основе отслеживаемых параметров можно предсказать сбои в работе накопителя. Если на основе отслеживаемых параметров вероятность появления ошибки возрастает, S.M.A.R.T. генерирует для BIOS или драйвера операционной системы отчет о возникшей неполадке, который указывает пользователю на необходимость немедленного резервного копирования данных до того момента, когда произойдет сбой в накопителе.
На основе отслеживаемых параметров S.M.A.R.T. пытается определить тип ошибки. По данным компании Seagate, 60% ошибок механические. Именно этот тип ошибок и предсказывается S.M.A.R.T. Разумеется, не все ошибки можно предсказать, например появление статического электричества, внезапную встряску или удар, термические перегрузки и т.д.
Для функционирования S.M.A.R.T. необходима поддержка на уровне BIOS или драйвера жесткого диска операционной системы (и, естественно, накопитель на жестких дисках, который поддерживает эту технологию). Функции S.M.A.RT. задействованы несколькими программами, например Norton Smart Doctor от компании Symantec, EZ от компании Microhouse International или Data Advisor от Ontrack Data International.
Обратите внимание, что традиционные программы диагностики диска, например Scandisk, работают с секторами данных на поверхности диска и не отслеживают всех функций накопителя в целом. В некоторых современных накопителях на жестких дисках резервируются секторы, которые в будущем используются вместо дефектных. Как только "вступает в дело" один из резервных секторов, S.M.A.RT. информирует об этом пользователя, в то время как программы диагностики диска не сообщают о каких-либо проблемах.
Каждый производитель накопителей на жестких дисках по-своему реализует параметры монитора S.M.A.R.T., причем большинство из них реализовали собственный набор параметров. В некоторых накопителях отслеживается высота "полета" головок над поверхностью диска. Если эта величина уменьшается до некоторого критического значения, то накопитель генерирует ошибку.
В других накопителях выполняется мониторинг кодов коррекции ошибок, который показывает количество ошибок чтения и записи на диск.
В большинстве дисков реализована регистрация следующих параметров:
- высота полета головки на диском;
- скорость передачи данных;
- количество переназначенных секторов;
- производительность времени поиска;
- время раскручивания жесткого диска;
- частота сбоев при поиске;
- количество повторений раскручивания жесткого диска;
- количество повторных калибровок накопителя.
Каждый параметр имеет пороговое значение, которое используется для определения того, появилась ли ошибка. Это значение устанавливается производителем накопителя и не может быть изменено.
Следует отметить, что накопители НЕ МОГУТ сами сообщать о своем состоянии посредством технологии SMART, для этого существуют специальные программы. Таким образом, использование технологии SMART немыслимо без двух составляющих:
- ПО, встроенного в контроллер накопителя.
- Внешнего ПО, встроенного в хост.
Программы, отображающие состояние SMART-атрибутов, работают по следующему алгоритму:
- Проверяют наличие поддержки технологии SMART накопителем.
- Подают в накопитель команду запроса
- Разбирают табличные структуры, извлекая из них номера атрибутов и их числовые значения.
- Сопоставляют стандартизированные номера атрибутов их названиям (иногда - в зависимости от типа, модели или фирмы-изготовителя HDD, как, например, в программе Victoria.
- Выводят числовые значения в удобном для восприятия виде (тут каждый программист может делать по-своему, например, конвертировать HEX -значения в десятичные).
- Извлекают из таблиц флаги атрибутов (признаки, характеризующие назначение атрибута в рамках конкретной firmware накопителя, например, "жизненно важный" или "счетчик").
- На основании всех таблиц, значений и флагов выводят общее состояние устройства.