Опубликован: 03.05.2012 | Доступ: свободный | Студентов: 3242 / 781 | Оценка: 4.39 / 4.14 | Длительность: 19:41:00
Тема: Сетевые технологии
Лекция 9:
Технологии SDH
Аннотация: Дается описание высокоскоростной технологии передачи —синхронной цифровой иерархии (SDH). Приводится описание элементов этой системы и образование групповых трактов. Показана архитектура различных сетей SDH. Изложены методы передачи мультиплексированных потоков с большим объемом информации и без полного демультиплексирования при выделении каналов на транзитных участках. Рассмотрены методы повышения надежности и устойчивости сетей SDH.
Ключевые слова: модуляция, иерархия, DS-1, DS-2, DS-3, DS-4, бит, вывод, маршрутизация, optical networking, SONET, ANSI, international, UNION, SDH, digital, hierarchy, ADM, Add, DROP, multiplexer, terminal, мультиплексор, path, element, единица, optical carrier, Синхронный, модуль, STM, transport, MODULE, STM-1, конкатенация, высокоскоростной канал, скорость передачи, чередование, мультиплексирование, байт, связь, информация, section, head, SOH, regenerate, RSOH, BIP, внешний канал, PDH, TUG, tributary, POH, демультиплексор, back-to-back, стоимость, поток, терминал, виртуальные топологии, automatic, protection switching, APSE, определение, линия связи, контроль, селекция, выход, UniDirectional, UPSR, bidirectional, WDM, cross connection
Образование групповых трактов высокого порядка. Плезиохронная цифровая иерархия
Известно, что широко распространенная технология мультиплексирования ИКМ-30 (ИКМ — импульсно-кодовая модуляция) использует принципы образования группового тракта, который позволяет в течение 125 мкс передать информацию 32 каналов (30 пользовательских и 2 служебных). Однако по мере роста потребностей набор типов аппаратуры расширялся, и увеличивались скорости, достигаемые при передаче по физическим каналам. Появились устройства, способные за то же время 125 мкс передавать информацию для 120 каналов (ИКМ —120), 480 (ИКМ — 480), 1920 (ИКМ-1920) и 7680 каналов (ИКМ —7680). В международных документах они имеют следующие обозначения: ИКМ-30 — E1, ИКМ —120 -E2, ИКМ — 480 —E3, ИКМ-1920- E4, ИКМ —7680-E4. Для Северной Америки и Канады принята другая иерархия: 24 канала — DS-1, 96 каналов — DS-2, 672 канала — DS-3, 4032 канала — DS-4. Для Японии принята следующая иерархия: 24 канала — DS-1, 96т каналов — DS-2, 480 канала — DSJ-3, 1440 каналов — DSJ-4.
Эти ряды, перечисляющие возможные иерархии цифровой аппаратуры передачи информации, называются плезиохронной цифровой иерархией ПЦИ (PDH — Plesiochronous Digital Hierarchy).
Ниже в таблице 9.1. приведены основные характеристики систем,входящих в плезиохронную иерархию.Показанные в таблице 9.1 уровни цифровой иерархии имеют следующие названия:
- 0-й уровень — основной цифровой канал (ОЦК);
- 1-й уровень — первичный цифровой канал (ПЦК);
- 2-й уровень — вторичный цифровой канал (ВЦК);
- 3-й уровень — третичный цифровой канал (ТЦК);
- 4-й уровень — четвертичный цифровой канал (ЧЦК).
| Уровень иерархии | Характеристики систем иерархии | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Американские системы | Японские системы | Европейские системы | |||||||
| Скорость Кбит\сек | Коэффициент мультиплексирования | Число каналов | Скорость | Коэффициент мультиплексирования | Число каналов | Скорость | Коэффициент мультиплексирования | Число каналов | |
| 0 | 64 | 1 | 64 | 1 | 64 | 1 | |||
| 1 | 1544 | 24 | 24 | 1544 | 24 | 24 | 2048 | 30 | 30 |
| 2 | 6312 | 4 | 96 | 6312 | 4 | 96 | 8448 | 4 | 120 |
| 3 | 44736 | 7 | 672 | 32064 | 5 | 480 | 34368 | 4 | 480 |
| 4 | 274116 | 6 | 4032 | 97728 | 3 | 1440 | 13284 | 4 | 1920 |
| 564992 | 4 | 7680 | |||||||
Рассматриваемые системы передачи имели следующие недостатки.
Первый недостаток — многообразие систем передач с различными скоростями требовало согласования систем передач, что в большинстве случаев решалось только переходом к аналоговой форме сигнала и переходу от одной системы передачи к другой. На магистральных международных системах передачи при этом ухудшалось качество передаваемого сигнала. Такое изменение существенно сказывалось на сбыте продукции, поскольку установка различных систем не могла быть поддержана единой телекоммуникационной транспортной сетью.
Другой способ согласования различающихся скоростей — добавление при передаче выравнивающих бит; при приеме эти биты изымаются. Добавления и изъятия усложняют промежуточный вывод отдельных каналов на транзитных участках. В результате проявляется второй недостаток.
Второй недостаток. После того как цифровые системы начали широко развиваться не только на магистральных направлениях (междугородних и международных), они стали применяться на межстанционных связях, а также для выделения в аренду различным предприятиям, где требуется относительно малое число каналов. Таким образом, выявилось противоречие между выпуском экономически выгодных систем, рассчитанных на большое число каналов, и массовыми потребностями в аренде малого числа каналов.
Третий недостаток плезиохронных систем — небольшое количество служебной информации. Из-за этого становится невозможной маршрутизация транспортных потоков, что существенно снижает способность транспортной сети к поддержанию связи во время отказов отдельных участков.
Для устранения этих недостатков в США разработана и принята система стандартов Синхронной оптической сети — Synchronous Optical Network —(SONET). Эта система была принята в 1985 году комитетом T1/ X1 ANSI [13-19], а в 1988 году она была адаптирована ITU-T (International Telecommunication Union — Telecommunication) к Европейским стандартам. Также была разработана единая версия синхронной цифровой иерархии — SONET/SDH (Synchronous Digital Hierarchy) [ 63 ] Вначале эта версия предназначалась для применения в оптических сетях, теперь она применяется и при наличии другой широкополосной физической сети.
Основные участки системы SONET/SDH
В системе SONET/SDH определяется три участка передачи, соответственно, три вида оборудования ( рис. 9.1):
- секционное (регенераторное) оборудование;
- линейное (мультиплексное) оборудование;
- маршрутное оборудование.

Термины на рис.9.1 определяются следующим образом:
Секция (регенерационная секция) — это участок кабельной или волоконно-оптической линии связи между двумя активными элементами, называемыми регенераторами.
Линия связи (мультиплексорная секция) — это несколько секций, расположенных между промежуточными мультиплексорами ввода/вывода МВВ (ADM — Add Drop Multiplexer). Они допускают работу в транзитном режиме и в режиме ввода/вывода дополнительных каналов в "проходящий" транзитом сигнал или из него, осуществляемую без демультиплексирования всего сигнала до уровня вводимого или выводимого сигнала.
Маршрут — в данном случае это совокупность линий между оконечными мультиплексорами (TM — Terminal Multiplexer). Этот мультиплексор преобразует вводимые стандартные каналы в сигналы системы SONET/SDH и обратно. В терминологии ANSI оконечные мультиплексоры называют также оконечными точками маршрута (PTE — Path Terminating Element).
Иерархия модулей
Модули разделяются по уровням. В системе SDH известны следующие уровни иерархии модулей [ 26 ]
- STM-1 — синхронный транспортный модуль первого уровня,имеет скорость 155,52 Мбит/с. Этот модуль является основой системы SDH. Путем мультиплексирования нескольких модулей STM-1 получаются модули более высоких уровней.
- STM- 4 — синхронный транспортный модуль четвертого уровня,имеет скорость 622,08 Мбит/с.
- В рекомендациях ITU [11] определен модуль STM-N — синхронный транспортный модуль уровня N, где N = 1, 4, 16, 256,с соответствующим этим коэффициентам увеличением скорости.
- В России на радиорелейных линиях применяется STM-0 синхронный транспортный модуль нулевого уровня. Он имеет скорость 51,84 Мбит/с> и не входит в иерархию SDH.
В рамках системы SONET основная единица иерархии — синхронный транспортный сигнал STS1 (Synchronous Transport Signal) уровня 1. Остальные синхронные транспортные сигналы более высоких уровней получаются мультиплексированием и увеличением скорости в n раз. Это число может принимать 14 значений:

Сигналы выше уровня 3 принято обозначать [ 27 ] как OC (Optical Carrier) — оптическая несущая иерархии SONET. При этом сигналы выше 9-го уровня считаются гипотетическими электрическими синхронными транспортными сигналами. Это название указывает на проблемы с реализацией таких сигналов в электрической форме.
Принципы мультиплексирования в иерархии SDH/SONET
Принцип передачи сигналов заключается в том, что каждые 125 мс передается стандартный синхронный модуль ( рис. 9.2), который называется "синхронный транспортный модуль" (STM — Synchronous Transport
Module). Рассмотрим детальнее модуль STM1 [
[
79
]
При передаче в канал он содержит 9 временных положений
[
2
]
в каждом, из которых содержатся 270 байтов (8 битовые единицы). Таким образом, требуемая скорость равна 
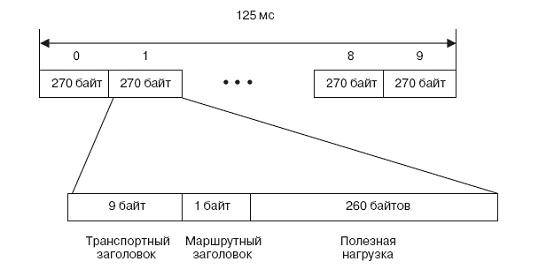
Из нескольких циклов, составляющих формат модуля STM-1 (в данном случае это цикл нижнего уровня), может быть составлен мультицикл (сверхцикл), содержащий несколько циклов нижнего уровня. Для объединения нескольких модулей используется конкатенация (сцепление).Каждый из модулей нижнего уровня, входящий в модуль высокого уровня, имеет байты для определения его места как компонента более высокоскоростного канала. Эти указатели местоположения начала модулейнижнего уровня включаются в служебную информацию модуля верхнего уровня. При этом содержание бит каждого временного положения увеличивается. На рис.9.3 показан модуль STM-4, который объединяет четыре модуля STM-1.
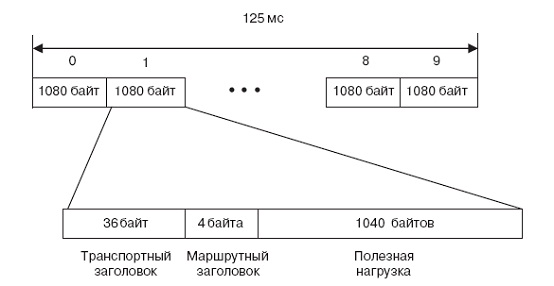
При этом содержание каждого из временных положений увеличивается в 4 раза и составляет по  , из них:
, из них:
-
 — транспортный заголовок;
— транспортный заголовок; -
 — маршрутный заголовок;
— маршрутный заголовок; -
 — полезная нагрузка.
— полезная нагрузка.
Линейная скорость увеличивается тоже в 4 раза:

При STM-16 указанные поля формата увеличиваются в 16 раз, и соответственно увеличивается скорость. Сигнал STM-N создается путем чередования байтов STM-1, которые взаимно синхронизированы ( рис. 9.4).
Временное (частотное) выравнивание скоростей производится при генерации каждого STM-1. Если имеются сигналы от другого узла SDH, с другой скоростью или частотой, то для выравнивания их скоростей вставляются выравнивающие байты, чтобы синхронизировать тактовые импульсы местного узла. Поэтому независимо от происхождения трафика перед мультиплексированием все модули STM-1, вставляемые в STM-N имеют одинаковую скорость передачи, а также один и тот формат.

Заметим, что чередование байтов достаточно просто осуществляется только тогда, когда все STM-1 имеют одинаковую структуру полезной нагрузки, например, несущую только одинаковые данные потока  . Особые правила (правила бесконфликтной взаимосвязи) применяются в том случае, если используется каскадное мультиплексирование. Например, четыре STM-1 загружаются в один модуль STM-4 и далее полученные модули загружаются как 4STM-4 в модуль STM-16. В этом случае первый каскад использует мультиплексирование по байтам, а второй — по группам, состоящим из четырех байт. Подробные требования к правилам бесконфликтной взаимосвязи можно прочесть в
[
27
]
. Особые правила (правила бесконфликтной взаимосвязи) применяются в том случае, если используется каскадное мультиплексирование. Например, четыре STM-1 загружаются в один модуль STM-4 и далее полученные модули загружаются как 4STM-4 в модуль STM-16. В этом случае первый каскад использует мультиплексирование по байтам, а второй — по группам, состоящим из четырех байт. Подробные требования к правилам бесконфликтной взаимосвязи можно прочесть в
[
27
]