Будущее робототехники
| Название | Характерные размеры |
|---|---|
| Наноробот | Менее 1 микрометра |
| Микроробот | Менее 1 миллиметра |
| Милиробот | Менее 1 см |
| Миниробот | Менее 10 см |
| Малый робот | Менее 100 см |
Необходимо также отметить, что термин "наноробот" иногда при- меняется к устройствам, которые манипулируют наноразмерными предметами, при этом сам инструмент может быть макроразмеров, но именоваться нанороботом.
Как было рассказано в предыдущих лекциях, управление движением макророботов предполагает использование сложной механики и электроники. Преимущество микро- и нанороботов состоит в том, что им не нужна большая мощность и вместо использования встроенного активного источника энергии в большинстве случаев они могут получать энергию активации извне и на расстоянии.
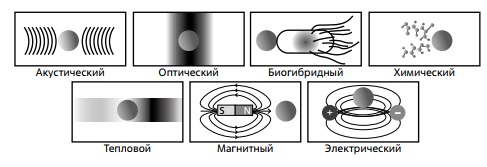
Для управления микророботами могут использоваться различные методы активации: оптические, химические, акустические и другие (см. рис. 14.14). Иногда для достижения более точного результата ком- бинируют несколько способов управления.
Источник: [ "Источники использованной литературы" ]
Микророботы уже используются в биотехнологической промышленности для доставки лекарств, мониторинга и лечения заболеваний человека, и это направление быстро развивается.
Говоря о классификации микророботов, можно сослаться на вы- деление шести категорий, предложенных в работе [ "Источники использованной литературы" ]. Эти категории различаются по наличию способности манипулировать объектами, иметь привод на борту и обладать свойством самоходности (см. 14.2).
| Манипуляция | Движение | Привод на борту | Самоходность | |
|---|---|---|---|---|
| Фиксированные пассивные микроинструменты | + | - | - | - |
| Фиксированные активные захваты | + | - | + | - |
| Нефиксированные микрочелноки | + | + | - | - |
| Нефиксированные микрозахваты | + | + | + | - |
| Самодвижущиеся микророботы | - | + | - | + |
| Мобильные микрохирургические роботы | + | + | + | + |
Согласно [ "Источники использованной литературы" ], большинство нанороботов относятся к одной из четырех категорий: переключатели, двигатели, челноки и автомобили. Нанороботы переключатели могут менять состояние "выключено/включено" при изменении параметров окружающей среды (температура, излучение, химические реакции). Наномоторы позволяют преобразовывать энергию в движение, например, для перемещения молекул. Челноки способны доставлять химические вещества в определенные, целевые области, например для лечения пациента. Нанороботы-автомобили, наиболее сложные устройства из перечисленных, могут самостоятельно передвигаться под воздействием химических или электромагнитных катализаторов.
На момент написания курса наноробототехника находилась в основном на стадии теоретических и научно-экспериментальных разработок и не нашла пока массового промышленного применения, однако направление имеет высокий потенциал применения во многих областях. Возможности манипулирования элементами наноуровня позволят создавать уникальные изделия и материалы с новыми свойствами, проводить операции на молекулярном уровне. Использование нанороботов в качестве исследовательских инструментов поможет ученым изучить наноразмерный мир в самых разных областях знания.
Конечно, коснуться всех научных направлений и школ, которые обещают прорывы в области робототехники, невозможно, мы рассмотрели лишь некоторые, связанные с общим направлением создания новых биовдохновленных роботов, вписывающихся в переход к новой пятой промышленной революции, к построению новой биоэкономики, к созданию роботов из новых материалов, более дружественных человеку, более совместимых с человеком, более интеллектуальных.
Далее перейдем к рассмотрению целого спектра технологий, которые развиваются по разным направлениям и обещают в краткосрочной перспективе определенные сдвиги.