Циклы
При написании программ часто возникает необходимость в циклическом повторении группы команд. Для этого используется языковая конструкция цикл, которой в NXT-G соответствует блок Loop.
Внутрь цикла помещаются блоки, которые нужно выполнить многократно. Заметим, что следует с осторожностью (точнее, с пониманием) размещать в цикле блоки, которые сами в некотором роде обладают цикличностью, например Move, Sound и некоторые другие.
Программируя цикл, мы должны заранее знать в каком случае он прекратит свою работу. Завершение цикла (выход из цикла) может происходить по разным причинам. В NXT-G возможны следующие способы выхода из цикла, доступные в поле Control:
- Forever - бесконечно (по умолчанию);
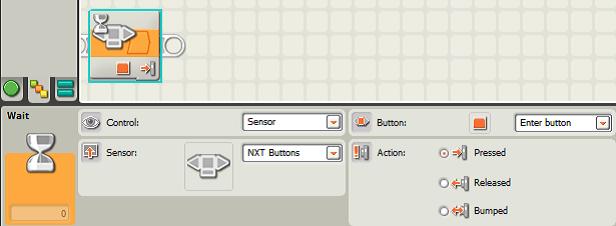
- Sensor - по срабатыванию датчика;
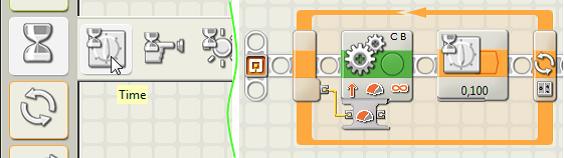
- Time - через определённое время;
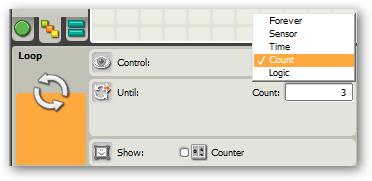
- Count - после выполнения цикла заданного количества раз;
- Logic - при выполнении некоторого логического условия, заданного программистом.
В процессе изучения языка NXT-G мы постепенно освоим все эти способы. Начнём с бесконечного цикла.
Простейшие виды циклов
Задание 4.1. Подготовьте робот с датчиком цвета в передней части; датчик должен быть направлен вниз и находиться на расстоянии около 1 см от стола. Расположите робот перед чёрным полем (или чёрной линией) на расстоянии от неё около 20 см.
Задание 4.2. Движение до линии. Используя датчик цвета в режиме измерения освещённости, напишите программу, позволяющую роботу доехать до чёрной полосы и остановиться (см. задание 3.3).
Задание 4.3. Движение до линии и обратно. Измените программу из задания 4.2 так, чтобы после достижения чёрной линии робот отъезжал на белое поле.
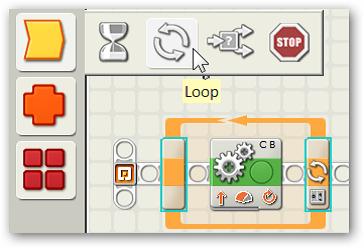
Задание 4.4. Бесконечное циклическое движение до линии и обратно. Измените программу из задания 4.3 так, чтобы робот выполнял движение до линии и обратно бесконечное количество раз. Для этого заключите предыдущую программу в бесконечный (forever) цикл.
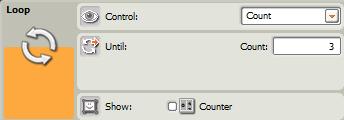
Задание 4.5. Циклическое движение до линии и обратно по счётчику. Измените программу из задания 4.4 так, чтобы робот выполнял движение до линии и обратно три раза. Для этого измените настройки цикла следующим образом:
Движение робота по линии
Пример 4.1. Перейдём к классической задаче о движении робота вдоль линии. Полигон с такой линией имеется в каждом наборе.
Разберёмся, может ли робот двигаться по линии, то есть так, чтобы сенсор всегда находился на чёрном поле. Для этого представим себе, что через некоторое время после старта сенсор "уехал" с чёрного поля и оказался на белом. Мы понимаем, что в этом случае робот должен немного подрулить чтобы вернуться обратно на чёрную линию. Но куда именно подрулить: налево или направо? Дело в том, что белый цвет по обе стороны от чёрной линии одинаков. Поэтому, попав в такую ситуацию, робот не сможет принять однозначное правильное решение.
Выходом из такой ситуации будет небольшое изменение постановки задачи: робот должен двигаться не по линии, а по границе чёрного и белого.
Что при этом изменится? Робот и человек по-разному воспринимают границу линии.

Мы видим, что датчик цвета при своём движении влево или вправо не наблюдает резкой границы чёрного и белого. Это происходит из-за того, что при его перемещении, например, слева направо, количество света, попадающего в сенсор, постепенно увеличивается. Значит показания датчика также будут плавно возрастать.
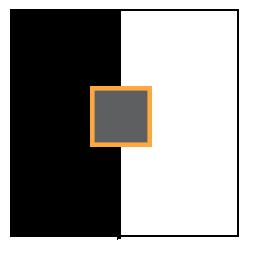
Нас больше всего устраивает среднее положение датчика, то есть когда он находится прямо над границей. В этом случае датчик наблюдает не чёрный и не белый цвета, а некоторый "средний" - серый. Для определения показания датчика для серого цвета нужно найти среднее арифметическое между белым и чёрным.
При движении робота уход влево (в чёрную область) приведёт к уменьшению показаний датчика, а уход вправо (в белую область) - к увеличению. Таким образом мы всегда сможем отличить левое от правого.
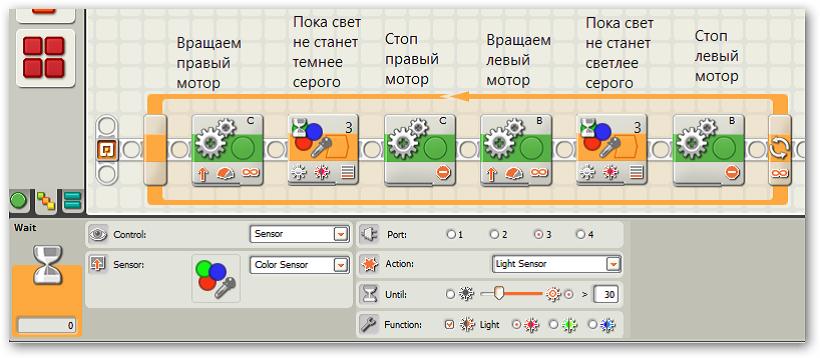
Получим примерно такую программу для движения вдоль линии:
Обратите внимание на следующее: перед стартом робот ставится на поле так, чтобы датчик цвета "смотрел" на границу линии: чёрное - слева, белое - справа.
Задание 4.6. Найдите отличия между предложенным решением и программой из задания 4.4.
Задание 4.7. Запрограммируйте робот на движение вдоль чёрной линии, изменив код программы 4.4 и проверьте её работоспособность.
Задание 4.8. Требуется запустить робот по той же линии, но в обратную сторону. Как это сделать не изменяя программу?
Цикл со счётчиком. Передача данных между блоками
Разберём следующий пример.
Пример 4.2. Написать программу движения робота с ускорением.
Для начала напишем программу движения робота с постоянной скоростью:
- Повтори 20 раз:
- Вперёд
В настройках блока Move отметьте Coast (без торможения в конце выполнения блока). В поле Duration оставим значение 1 Rotation.
Проверьте работу программы. Робот движется прямо с постоянной скоростью.
Для создания ускорения будем использовать передачу данных из цикла на блок движения. Очевидно, в нашем случае ускорение предполагает постепенное увеличение скорости робота, то есть увеличение мощности мотора.
Изменим программу.
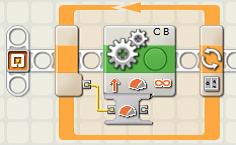
В настройках блока Loop включите флажок Show Counter (Показать Счётчик). Обратите внимание на то, как изменился внешний вид цикла: появился разъём Loop Count

увеличить изображение
Рис. 4.6. Включение отображения счётчика цикла (слева) и доступ к нему (справа)
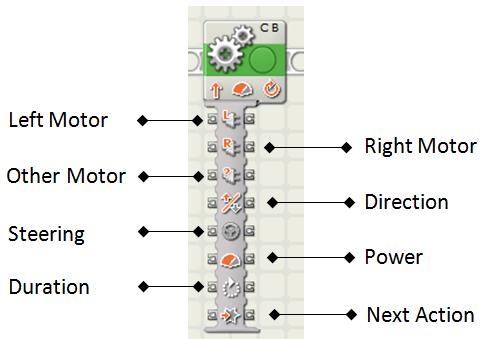
Откройте концентратор данных блока Move, щёлкнув на кнопке в левой нижней части блока:

В результате откроются входные (расположенные на левой стороне) и выходные (расположенные на правой стороне) разъёмы, к которым можно подключать шины данных от разъёмов других блоков1Щёлкнув по тому же месту блока можно закрыть выдвижную панель. (Рис. 4.8). Таким способом можно передавать данные внутри программы на NXT-G без фактического использования переменных.
Соедините шиной разъём счётчика цикла и разъём Power (Мощность) блока Move (при наведении указателя мыши на разъём появляется соответствующая всплывающая подсказка). Чтобы сделать соединение, щёлкните левой кнопкой мыши на начало, проведите мышь в конец пути и щёлкните ещё раз; можно делать дополнительные щелчки по ходу траектории в местах её желаемых сгибов. В поле Duration укажите Unlimited (без ограничения длительности). Сверните концентратор данных щёлкните по выпадающей панели блока так, как будто хотите её свернуть. Все разъёмы, к которым не подходят шины, исчезнут. Этот трюк может заметно уменьшить площадь, занимаемую программой.
В результате программа примет вид:
Проверьте её работу.
Для того чтобы ускорение было более наглядным, добавьте в цикл небольшую задержку:
Пример 4.3. Вывод информации на экран блока NXT.
Проверим, что на самом деле поступает из цикла на вход блока Move. Для этого разработаем упрощённую программу, в которой значение счётчика цикла выводится на экран блока NXT. Напомним, что для вывода используется блок Display из панели Common.
Мы собираемся выводить на экран числовую информацию, поэтому её нужно вначале преобразовать к текстовому типу. Делается это при помощи блока Number to Text панели Advanced.
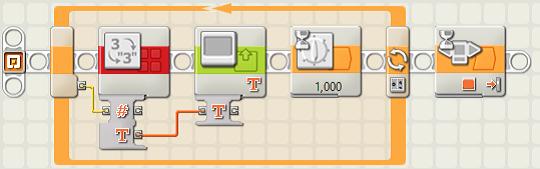
Получаем следующую схему программы:
- в настройках блока Loop значение счётчика устанавливаем равное 10;
- значение счётчика цикла передаём на преобразователь "Число ? Текст";
- полученный текст подаём на вход блока Display;
- делаем задержку, чтобы успеть рассмотреть значение на экране;
- после цикла ставим задержку до нажатия на кнопку Start, чтобы рассмотреть последнее выведенное на экран значение.
Пример программы приведен на Рис. 4.12.
Обратите внимание на то, что шины разных данных окрашены по-разному. Всего в NXT-G используются три типа данных, каждому из них соответствует своя окраска:
- числовой тип данных - жёлтый цвет;
- текстовый тип данных - красный цвет;
- логический тип данных - зелёный цвет.
На Рис. 4.13 приведены настройки последнего блока: