
|
Здравствуйте. А уточните, пожалуйста, по какой причине стоимость изменилась? Была стоимость в 1 рубль, стала в 9900 рублей. |
Инспектор
Вы можете этот курс.
Опубликован: 02.07.2009 | Уровень: специалист | Доступ: платный
Лекция 5:
Мягкая передача вызова и управление мощностью в CDMA
4.1.3. Процедура совмещенного мягкого хэндовера
Отметим, что различают два типа хэндовера:
- Управляемый базовой станцией (MAHO — Mobile Assisted Handover), при котором мобильная станция выполняет измерение интенсивности сигнала и передает эти данные на базовую станцию.
- Управляемый мобильной станцией (MCHO — Mobile Controlled Handover), при котором уровень поступающих сигналов от разных базовых станций принимается мобильной станцией. Она же принимает решение, где и какой хэндовер ей необходим.
Ниже рассматривается метод MAHO.
Мобильная станция выполняет измерение интенсивности сигналов по пилотным каналам (Pilot Channel — PICH), получаемых от соседних базовых станций, и рассылает сообщения, содержащие данные о тех PICH, которые пересекли некоторые пороговые значения. Нас интересуют в данном случае два пороговых значения:
- PICH, которые имеют достаточную интенсивность сигнала для использования в системе передачи сигналов;
- PICH, которые имеют низкую интенсивность сигнала и не могут быть использованы для передачи сигналов.
Эти пороговые значения составляют гистерезисную петлю, которая обеспечивает устойчивость процесса. Это означает, что каналы порога оценки низкой интенсивности уровня несколько выше порога высокой интенсивности.
Основываясь на полученной информации, мобильная станция может добавлять или удалять PICH в активном наборе.
Такая же информация собирается от множества базовых станций. Информация, поступающая от станций, различных секторов антенны или сигналы, проходящие по множеству путей, могут объединяться в один сигнал с помощью RAKE-приемников (суммирующих приемников). Тогда оценка пилот-канала идет по суммарному значению объединенного потока от данной станции.
Динамические пороги мягкого хэндовера
Как правило, мягкий хэндовер улучшает характеристики системы, но может в некоторых ситуациях отрицательно воздействовать на пропускную способность системы и сетевые ресурсы. Для прямых линий связи при чрезмерно частом хэндовере уменьшается количество свободных линий и при этом расходуется больше сетевых ресурсов. Корректировка параметров хэндовера на базовых станциях не обязательно решает проблему.
Некоторые области в соте получают только слабые пилот-сигналы (требующие более низких порогов хэндовера), а другие области получают несколько сильных и доминирующих пилот-сигналов (требующих более высоких порогов передачи вызова). Для того чтобы добавлять в активный набор свободные пилот-сигналы, используются следующие принципы:
- Мобильная станция обнаруживает прямой пилот-сигнал, который пересекает данный статический порог
 . В этом случае порог измеряется мощностью чипа (
. В этом случае порог измеряется мощностью чипа (  ).
). - При пересечении статистического порога пилот-сигнал переводится в список кандидатов и начинается более частая проверка пилот-сигналов на достижение величины, приближающейся к величине
 .
.
- Сравнение с величиной порога позволяет определить, достаточна ли величина второго сигнала, чтобы его присоединить к активному набору (см. порог COMP).
Условием выбора нового канала является неравенство
![10\log{p_{cj}}\ge max\left[k_1 10\log\left(\sum\limits_{L=1}^{N_A}P_{ai}+\bigtriangleup P_{T1}\right)\right],](/sites/default/files/tex_cache/b417922d1a8869dbeef90fcaec674b7c.png)
где  — напряженность PICH выбираемого сигнала;
— напряженность PICH выбираемого сигнала;  — напряженность i-го PICH в активном наборе;
— напряженность i-го PICH в активном наборе;  — число PICH в активном наборе, а
— число PICH в активном наборе, а  и
и  — задаваемые системные параметры, регулирующие данные для конкретной системы.
— задаваемые системные параметры, регулирующие данные для конкретной системы.
Когда мощность в каналах PICH в активном наборе мала, то добавление даже слабого PICH улучшает рабочие характеристики. Однако когда есть один доминирующий PICH, появление дополнительного более слабого PICH выше не улучшит рабочие характеристики, но будет зря тратить ресурсы сети. Динамические пороги мягкой передачи вызова уменьшают и оптимизируют сетевое использование ресурса.
Действия при применении динамической мягкой передачи вызова (мягкого хэндовера) следующие.
- После обнаружения, что в сети есть PICH величиной отношения
 выше , мобильные станции передают назад к сети сообщение об этом. Сеть занимает ресурсы передачи вызова и передает команду мобильной станции демодулировать этот дополнительный PICH. Пилот-сигнал 2 добавляется к активному набору мобильной станции.
выше , мобильные станции передают назад к сети сообщение об этом. Сеть занимает ресурсы передачи вызова и передает команду мобильной станции демодулировать этот дополнительный PICH. Пилот-сигнал 2 добавляется к активному набору мобильной станции. - Когда интенсивность PICH 1 (пилот-сигнал 1) уменьшается ниже динамического порога
 , процедура хэндовера удаляет PICH и возвращает его к набору кандидатов. Порог — функция полной энергии всех PICH в активном наборе. При удалении канала из активного набора общая мощность активных сигналов снижается. Мощность пилот-сигнала 1 продолжает падать, и если она снижается ниже статического порога
, процедура хэндовера удаляет PICH и возвращает его к набору кандидатов. Порог — функция полной энергии всех PICH в активном наборе. При удалении канала из активного набора общая мощность активных сигналов снижается. Мощность пилот-сигнала 1 продолжает падать, и если она снижается ниже статического порога  , PICH удаляется из набора кандидатов. Сообщение о PICH, мощность передачи которого оказалась ниже порога (например, и ), передается назад к сети, только когда это состояние сохраняется в течение заданного периода времени. Это учитывается с помощью таймера, который предотвращает передачу сообщения в случае временных колебаний уровня мощности.
, PICH удаляется из набора кандидатов. Сообщение о PICH, мощность передачи которого оказалась ниже порога (например, и ), передается назад к сети, только когда это состояние сохраняется в течение заданного периода времени. Это учитывается с помощью таймера, который предотвращает передачу сообщения в случае временных колебаний уровня мощности.
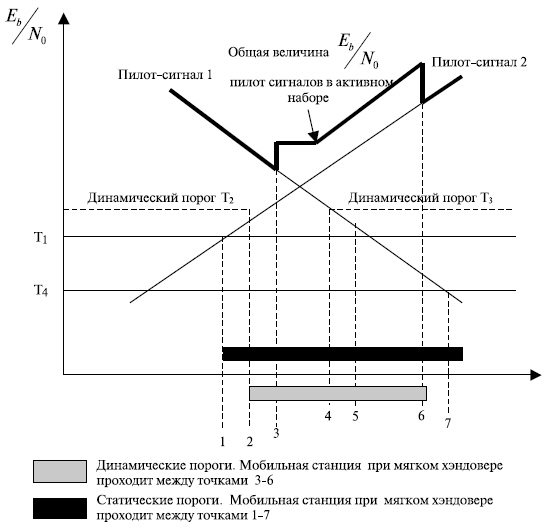
Рис. 4.4 показывает временную диаграмму мягкой передачи вызова с применением динамических порогов и связанных с этим событий, когда мобильная станция покидает обслуживающую базовую станцию (PICH 1) к новой базовой станции (PICH 2). Комбинация статических и динамических порогов (по сравнению с только статическими порогами) позволяет в результате уменьшить время и использование ресурса при мягкой передаче вызова.
Рассмотрим детально рис. 4.4.
- Когда пилот-сигнал 2 достигает порога , мобильная станция перемещает его в набор кандидатов.
- Когда пилот-сигнал 2 превышает порог (динамический), мобильная станция сообщает об этом сети.
- Мобильная станция получает команду добавить пилот-сигнал 2 к активному набору.
- Пилот-сигнал 1 падает ниже порога (относительно пилот-сигнала 2).
- Таймер хэндовера для пилот-сигнала 1 истекает. Мобильная станция сообщает сети о его напряженности.
- Мобильная станция получает команду удалить пилот-сигнал 1.
- Таймер хэндовера истекает после того, как пилот-сигнал 1 оказался ниже порога .
Обмен сигналами при процедуре мягкого хэндовера
Одно из главных преимуществ системы CDMA — способность мобильных станций установить связь более с чем с одной базовой станцией в течение одного и того же вызова. Эти функциональные возможности позволяют сети CDMA выполнить мягкий хэндовер. При мягком хэндовере вызова управляющая первичная базовая станция координирует свои действия с другими базовыми станциями. Каналы добавляются или удаляются из вызова. Это позволяет базовым станциям (общим количеством не свыше трех) получать/передавать пакеты речи от/к единственной мобильной станции для единственного вызова.
Процедура мягкого хэндовера повторяет процедуру жесткого хендовера. Исключение составляет заключительный этап. При мягком хэндовере подключение к новой станции BTS2 происходит до отключения текущей BTS1. Одновременная работа обеих станций в процессе хэндовера улучшает характеристики речевого тракта.