
| Украина |
Инспектор
Вы можете этот курс.
Опубликован: 27.12.2010 | Уровень: специалист | Доступ: платный
Лекция 7:
Графы в компьютерной геометрии
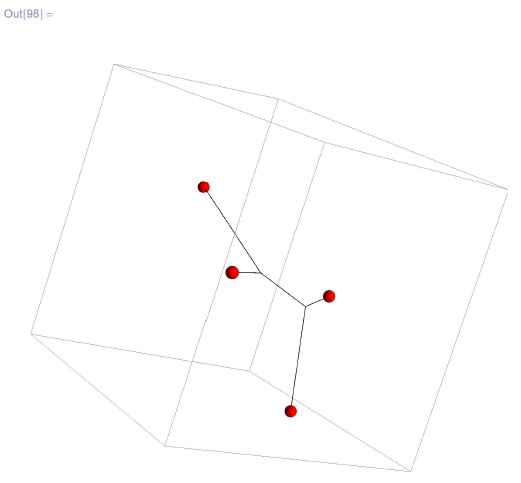
Замечание об управлении. При наведении курсора на граничную (красную) вершину сети (см. ниже), вершина становится желтой. Чтобы выделить граничную вершину сети, позиционируйте курсор на этой вершине и нажмите Ctrl. Вершина станет зеленой, "прикрепится" к курсору мыши и будет следовать за ним. Чтобы отпустить вершину, нажмите Shift. Вершина вновь станет красной. Нажимая левую клавишу мыши при курсоре, позиционированном на картинке, и двигая курсор, вы будете вращать картинку. Обратите внимание на скачкообразные перестройки структуры сети (бифуркации):
In [98]:=
DynamicModule[{pp, Locator3D, MyMean, testPoint, st, net4},
Locator3D[pts0_, ?_: Line] : =
DynamicModule [{pts, ppp, cur, с = False, covered = False, g, msAlt, bds, bm=-l,
bM = 1, ptsAlt, i - 1, testln = 2} ,
pts = pts0; ptsAlt = {0, 0, 0} ; msAlt ={{1.3, -2.4, 2.}, {-1.3, 2.4, -2.}};
cur = Dynamic[MousePosition["Graphics3DBoxIntercepts", msAlt]];
g=Graphics3D[Map[{Red, Sphere[#, 0.05]} &,
If [c, Drop[pts, {3}], pts] ] ≈ Join ≈
Table[
If [CurrentValue ["ControlKey"] bbcovered, с = True; msAlt = #; ptsAlt = pts[[j]] ;
If[CurrentValue["ShiftKey"], с = False];
testln = Length[CurrentValue[{"MousePosition", "GraphicsImageScaled"} ] ] ;
If [c, If [testln < 2, ptslij = ptsAlt] ;
bds = Transpose [AbsoluteOptions [g, PlotRange] [[1, 2]] ];
bm = 0 . 7 bds [[1]] ;
bM = 0 . 7 bds [[2]] ;
ppp = MyMean [pts [[j]] , #] ;
pts[[j]] = MapThread[Max[Min[#I, #3] , #2] &, {ppp, bm, bМ}];
ptsAlt = pts[[j]];
msAlt = #] ;
If [c, If [i == j, {Green, Sphere[pts[[i]] , 0.07]}, {}],
If [ (testln >= 2) && (testPoint[pts[[i]] , #] < 0.01 ) , covered = True; j = i;
{Yellow, Sphere[pts[[i]], 0.07]}, covered=False; {}]],
{i , 1, Length [pts] } ] ≈ Join ≈ {f[pts] } & /@ cur,
Boxed -> True, PlotRange -> ({-1.3, 1.3}, {-1.3, 1.3}, {-1.3, 1.3}}],
Initialization : -> (![\begin{matrix}
&&&MyMean[p_{-} , ms_{-} ] :=ms[[1]]+(ms[[2]]-ms[[1]]) \frac{(ms[[2]]-ms[[1]]).(p-ms[[1]])}{(ms[[2]]-ms[[1]]).(ms[[2]]-ms[[1]])};
\end{matrix}\\
\begin{matrix}
&&&testPoint[p_{-}, ms_{-}] : =
\end{matrix}\\
\begin{matrix}
&&&Module[\{v\}, v = p - ms[[1]]-(ms[[2]]-ms[[1]])\frac{(ms[[2]]-ms[[1]]).(p-ms[[1]])}{(ms[[2]]-ms[[1]]).(ms[[2]]-ms[[1]])};v.v];
\end{matrix}](/sites/default/files/tex_cache/59a50b040e23d78d199dc4f267a6fd38.png)
)];
st[gr_, ls_] : =
Quiet@Module [{vv, ее, len} , vv = First @g; ее = Last@g;
len = Plus @@ (EuclideanDistance @@ vv[[#]] &/@ee);
FindMinimum [ len, {#, RandomReal [ ] } &/@ Flatten [w[[ls]] ] , Method -> "PrincipalAxis"]≈
Join ≈ {g-}] ;
net4[p_] := Module [ {gl, g2 , g3, gg, res, min, resl, gr, sub, v, e, xl, yl, zl, x2 , y2 , z2},
gl = {(# &, /@p) ≈ Join ≈ {{xl, yl, zl}, {x2, y2, z2}} ,
{{1, 5}, {2, 5}, {5, 6}, (6, 3}, {6, 4}}};
g2 = { (# & /@p) ≈ Join ≈ {{xl, yl, zl}, {x2, y2, z2}},
{{1, 5}, {3, 5}, {5, 6}, {6, 2}, {6, 4}}};
g3 = { (# & /@ p) ≈ Join ≈ {{xl, yl, zl}, {x2, y2, z2}},
{{1, 5}, {4, 5}, (5, 6), {6, 3}, (6, 2}}};
gg = {gl, g2, g3} ; res = st[#, {5, 6}] & /@gg; min = Min[#[[l]] & /@ res] ;
resl = Select[res, #[[1]] == min &] // First; gr = resl // Last; sub = resl[[2]] ;
v = First@gr /. sub;
e = Last@gr;
Line[v[[#]] ] &, /@ e] ;
рр={{-1, 0, -1}, {-1, 0, 0}, {-1, 1, 0}, {1/2, 1/2, 1/2}};
рр={{-1, 0, -1), {-1, 0, 0}, {-1, 1, 0}, {1/2, 1/2, 1/2}};
Locator3D[pp, net4]]Из сказанного выше следует, что каждая кратчайшая сеть является деревом с терминалами степени не выше 3 и дополнительными вершинами степени 3. Отсюда вытекает, что если n - число терминалов, то дополнительных вершин может быть не больше n - 2 (проверьте). Тем самым имеется конечное, хотя и экспоненциально растущее с ростом n, число комбинаторных структур кратчайших сетей. Доказано, что проблема Штейнера на евклидовой плоскости является NP -трудной, т. е. скорее всего не существует полиномиального по n алгоритма построения кратчайшей сети.
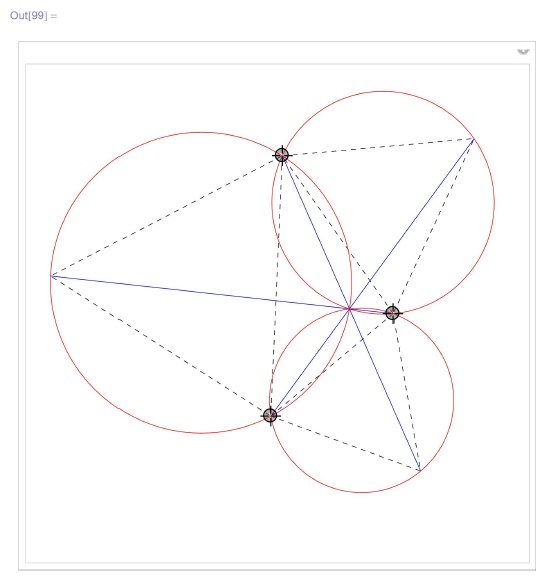
Тем не менее в последнее время разработаны достаточно быстрые алгоритмы, позволяющие строить кратчайшие сети для сотен точек. Приведем визуализацию одного свойства решения задачи Ферма, лежащего в основе всех точных алгоритмов.
Если на сторонах треугольника построить правильные треугольники, пересекающие исходный только по его сторонам, то три окружности (изображенные красным цветом), описанные вокруг построенных треугольников, пересекутся в одной точке. В той же точке пересекутся и три отрезка (изображенные синим цветом), каждый из которых соединяет добавленную вершину построенного правильного треугольника с противоположной ей вершиной исходного.
Если в треугольнике, построенном на терминалах, все углы не превосходят  , то общая точка пересечения красных окружностей и синих отрезков совпадает с решением задачи Ферма. Если же некоторый угол больше или равен , то решение задачи Ферма - вершина этого угла:
, то общая точка пересечения красных окружностей и синих отрезков совпадает с решением задачи Ферма. Если же некоторый угол больше или равен , то решение задачи Ферма - вершина этого угла:
In [99]:=
Manipulate[
Module [ {pc, рр, i , sign, pt3 = { } , tri = { } , seg = { } ,
с, r, circ = { } , dist, vec} ,![\begin{matrix}
&&&dist[v_{-}, w_{-}] : = \sqrt{(v - w) . (v - w)} ;
\end{matrix}](/sites/default/files/tex_cache/329fc8612258fd12ccc1bf080d7c8d8b.png)
vec[v_] := {Re[v],Im[v]};
pp = p ;
For i = 1, i <= 3, i++,
pc = Complex @@ # & /@ pp ;
sign = Sign[Det[{pp [[3]] -pp[[1]], pp[[2]] -PP[[1]] } ] ] ;
If[sign ≠ 0,
pt3=pc[[1]]e-sing i π/3 + pc[[2]] esing I π/3;
с = Mean [{pp [[1]], pp[[2]], vec@pt3}];
r = dist[c, pp[[1]]] ;
tri = tri ≈ Join ≈ {{pp[[1]] , pp[[2]] , vec@pt3, pp[[1]]}};
seg = seg ≈ Join ≈ { {vec@pt3, рр[[3]] } } ;
circ = circ ≈ Join ≈{ {с, r}};
];
pp = RotateLeft[pp];
] ,
Graphics [ { {Dashed} ≈ Join ≈ (Line /@ tri) } ≈ Join ≈ {Blue} ≈
Join ≈ (Line /@ seg) ≈ Join ≈ {Red} ≈ Join ≈
(Circle @@ # & /@ circ) , PlotRange -> {{-2, 2}, {-2, 2}},
AspectRatio -> Automatic]
] ,
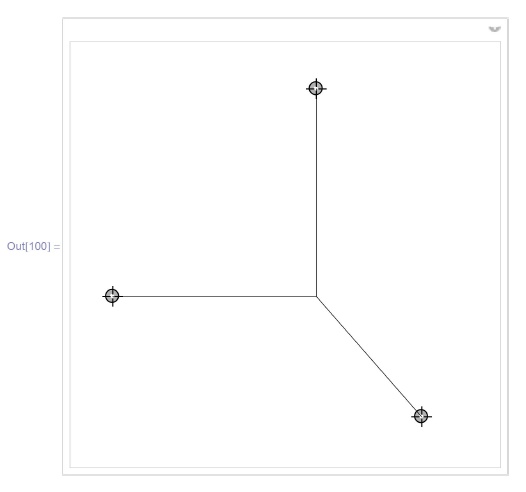
{{p, {{-1, 0}, {1, 0}, {0, 1}}}, Locator}]Если заменить евклидово расстояние на манхеттенское, т. е. порожденное нормой  , то соответствующие кратчайшие сети используются при проектировании микросхем.
, то соответствующие кратчайшие сети используются при проектировании микросхем.
Поэкспериментируйте с примером, приведенным ниже, и постарайтесь сформулировать правило, описывающее направление отрезков.
In[100] :=
Manipulate[Module[{x, y, s, distManhat},
distManhat[v_, w_] : = Plus @@ Abs@ (v - w) ;
s =
{x, y} /.
Last@
Quiet @ FindMinimum [Plus @@ (distManhat [ {x, y} , #] &/@p) ,
{{x, First@Mean[p]} , {y, Last@Mean[p]}} ,
Method -> "PrincipalAxis"];
Graphics [Line [{s, #}] &/@p, PlotRange -> { {-2 , 2}, {-2, 2}},
AspectRatio -> Automatic] ] ,
{{p, {{-1, 0}, {1, 0}, {0, 1}}}, Locator}
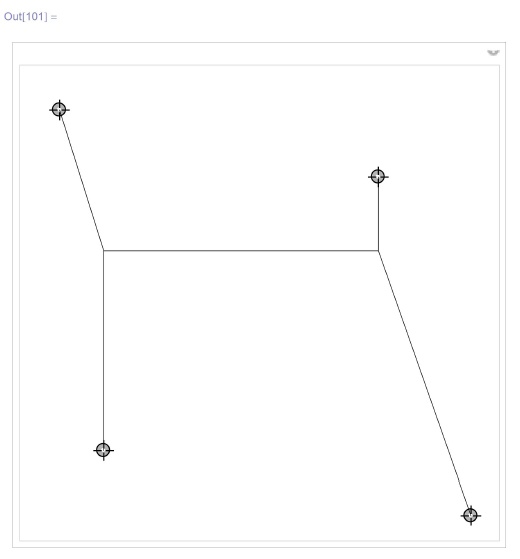
]Ниже приведена реализация кратчайшей сети на манхеттенской плоскости в случае четырех терминалов. Обратите внимание на скачкообразное изменение кратчайшей сети при смещении терминалов. Эта особенность поведения сети объясняется неоднозначностью решения, в отличие от евклидова случая.
In [101] :=
Manipulate[
Module [{gl, g2 , g3, xl, yl, x2, y2 , min, res, resl, gr,
sub, v, e, distManhat, st, MyShowGraph} ,
distManhat[v_, w_] : = Plus @@ Abs@ (v - w) ;
st[g_, ls_] : =
Quiet@Module [ {w, ее, len} , w=Vertices[g];
ее = Edges [g] ; len = Plus @@ (distManhat @@vv[[#]] & /@ee) ;
FindMinimum [len, {#, RandomReal [ ] } &/@ Flatten [w[[ls]] ] ,
Method -> "Newton"] ≈ Join ≈ {g}] ;
MyShowGraph[g_, opts : OptionsPattern[Graphics]] : =
Module [ {vv, ее} , vv = Vertices [g] ; ее = Edges [g] ;
Graphics [Line [vv[[#]] ] & /@ ее, opts] ] ;
gl = Graph[{{{l, 5}}, {{2, 5}}, {{5, 6}}, {{6, 3}},
{{6, 4}}}, ({#} &/@p) ≈ Join ≈ {{{xl, yl}}, {{x2, y2}}}];
g2 = Graph[{{{l, 5}}, {{3, 5}}, {{5, 6}}, {{6, 2}},
{{6, 4}}}, ({#} &/@p) ≈ Join ≈ {{{xl, yl}}, {{x2, y2}}}];
g3 = Graph[{{{l, 5}}, {{4, 5}}, {{5, 6}}, {{6, 3}},
{{6, 2}}}, ({#} &/@p) ≈ Join ≈ {{{xl, yl}}, {{x2, y2}}}];
g= {gl, g2, g3}; res = st[#, {5, 6}] &/@g; min = Min[#|[l]] & /@res] ;
resl = Select [res, #[[1]] == min &] // First;
gr = resl // Last;
sub = resl [[2]] ;
v = Vertices[gr] /. sub;
e = Edges [gr] ;
MyShowGraph[AddEdges[AddVertices[EmptyGraph[0], v] , e] ,
PlotRange -> {{-2, 2}, {-2, 2}}]
],
{{p, {{-1, 1}, {-1, -1}, {1, -1}, {1, 1}}}, Locator},
Initialization : -> (
Needs["Combinatorica""];
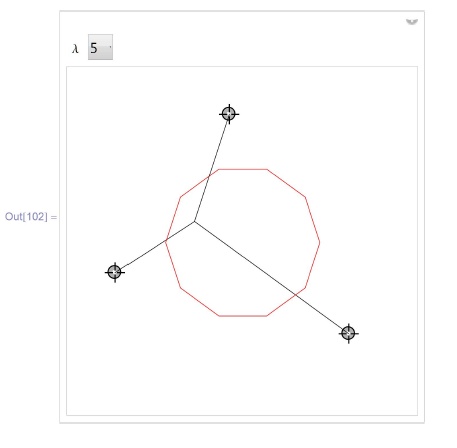
)]Отметим, что единичная окружность на манхеттенской плоскости является квадратом, диагонали которого лежат на координатных осях. Обобщением манхеттенской метрики являются так называемые  -нормы, для которых единичная окружность - правильный
-нормы, для которых единичная окружность - правильный  -угольник. Ниже приводится визуализация кратчайших сетей на -нормированной плоскости в случае трех терминалов. При
-угольник. Ниже приводится визуализация кратчайших сетей на -нормированной плоскости в случае трех терминалов. При  вновь отмечается скачкообразное поведение сетей при cмещении терминальных точек, что опять же объясняется неоднозначностью решения.
вновь отмечается скачкообразное поведение сетей при cмещении терминальных точек, что опять же объясняется неоднозначностью решения.
In[102] :=
Manipulate [
Module {x, y, s, lin, vec, nrf norm, cr, len, res, gsol, distNorm} ,
vec[v_] :={Re[v], Im[v]};
nr = vec@# & /@ Table [еI π/2(k+1/2) , {к, 0, λ - 1);
norm [v_] :=(Max@@(Abc[@.v]&/@nr)/(nr[[1]].{1,0});
distNorm [v_, w_] : = norm [v - w] ;
cr = ParametricPlot[({Cos[ϕ],Sin[ϕ]})/(norm[{Cos[ϕ], Sin[ϕ]}]),{ϕ,0,2π},}
PlotStyle -> {Red}];
len = Plus @@ (distNorm[{x, y} , #] & /@ p) ;
res = Quiet@FindMinimum[len, {{x, RandomReal [ ] } , {y, RandomReal [ ] }} ,
Method -> "Newton"];
s = {x, y} /. Last@res;
Show[{Graphics[Line[{s, #} ] & /@ p, PlotRange -> { {-2 , 2} , {-2,2}},
AspectRatio -> Automatic] , cr}]
] , {{λ, 3}, Rest@Range[20] }, {{p, {{-1, 0}, {1, 0}, {0, 1}}}, Locator}]