Нелинейная динамика и синергетика. Искусственный интеллект
Обозначим через  — сигналы и через
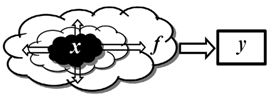
— сигналы и через  — данные. Схема процесса регистрации сигнала показана на рис. 2.4.
— данные. Схема процесса регистрации сигнала показана на рис. 2.4.
Если нам доступны только данные наблюдений, то процесс принятия решения — это выработка управляющего воздействия на основе зарегистрированных данных по закону  .
.
Законы управления такого типа называются обратными связями по наблюдениям.
До сих пор мы оставляли открытым вопрос о том, как выбирать функцию обратной связи. В классической теории управления вводятся понятия наблюдаемости и управляемости, соответствующие возможности восстановить состояние объекта по наблюдениям или перевести объект в произвольное заданное состояние. Здесь мы не будем детально останавливаться на этих вопросах. В последующих разделах книги будет делаться упор на программную и аппаратную реализацию тех или иных управляющих воздействий, способы выбора которых будут отдельно описываться для каждого из случаев.
Осознание связей между зарегистрированными данными и информацией, а также способы выбора управляющих воздействий в зависимости от той или иной информации будем называть знаниями.
Например, регистрация температуры тела человека дала значение более 38,5 градусов Цельсия. Это говорит о том, что пациент болен. Информация о разливе Нила в определенный день по лунному календарю дала возможность создать первую крупную цивилизацию в Египте, позволив прогнозировать этот процесс и организовать посевы риса в строго определенное время.
В работоспособных системах имеющиеся знания позволяют на основании получаемых данных формировать управляющие воздействия u, которые или дают какой-то выигрыш или позволяют как-то скомпенсировать негативную информацию. Без базы знаний постановка задачи о выработке обоснованных управляющих воздействий оказывается почти бессмысленной. Уточнение "почти" включено, т.к. при априорном отсутствии знаний их зачастую можно приобрести с течением времени.
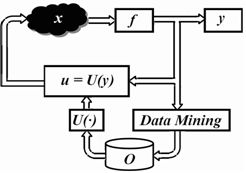
Совокупность накопленных определений, понятий и знаний относительно некоторой области называют онтологией. Знания в онтологию поступают как "извне" в виде постулируемых законов ("откровений"), так и формируются "внутри" системы при обработке данных. Процесс извлечения знаний из данных определяет круг задач такой новой бурно развивающейся области как Data Mining.
В контексте задач управления онтология служит своеобразной базой данных (знаний), из которой выбирается наиболее адекватная текущей ситуации функция управления  (рис. 2.5).
(рис. 2.5).
Изменение набора знаний со временем очень важная черта, позволяющая адаптироваться к изменяющимся условиям.
Реакция на информацию (управляющее воздействие) может быть ранее определена "извне" в соответствии с некоторыми правилами (законами), записанными в онтологии, либо формироваться "изнутри", адаптируясь к изменениям (т.е. пытаясь найти лучшее решение для поведения в изменившейся ситуации).
Процессы управления и накопления знаний часто являются взаимно противоречивыми. Целью управления обычно является достижение какого-то устойчивого состояния (по возможности не изменяющегося со временем). В этом состоянии "очень мало информации", и, следовательно, невозможно выявить или установить новые связи, значения и т.п. Например, о лежащем в пыли на обочине дороги камне мало что можно узнать при поверхностном осмотре. Его неизменность дает мало информации (характеристик изменений). Нужно совершить какое-либо действие — камень надо перевернуть, поднять, толкнуть или расколоть для получения какой-то информации. Это приводит к тому, что при синтезе законов управления часто сталкиваются с проблемой недостаточной вариативности последовательности наблюдений.
А.А. Фельдбаум сформулировал известный принцип "дуального управления": управляющие воздействия должны быть в известной мере изучающими, но, в известной мере, направляющими [Фельдбаум А. А., 1972]. Например, если цель адаптивного управления состоит в минимизации отклонения вектора состояния системы от заданной траектории, то это часто приводит к вырожденной последовательности наблюдений, в то время как для успешного проведения идентификации неизвестных параметров системы должно быть обеспечено "разнообразие" наблюдений.
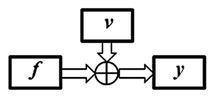
На практике реальная ситуация осложняется еще и тем, что при получении данных в любом регистрационном устройстве к сигналам добавляются некоторые помехи или ошибки  (рис. 2.6).
(рис. 2.6).
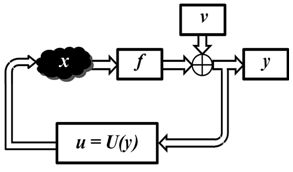
Структурная схема системы с обратной связью при наблюдениях с помехами приведена на рис. 2.7.
Хорошо поставленный эксперимент при тщательном измерении позволяет в некоторых случаях свести ошибки к минимуму:
 . Если первоначально "чистый" эксперимент не поставить, то стараются сделать его таковым с течением времени, т.е.
. Если первоначально "чистый" эксперимент не поставить, то стараются сделать его таковым с течением времени, т.е.  .
.